Osnovna škola "Petar Zrinski" Čabar



E-lektira

Ministarstvo znanosti,
obrazovanja i športa

Agencija za odgoj
i obrazovanje



Kroz nastavu informatike i drugih predmeta promičemo sigurno ponašanje na mreži i na internetu.
CSI - Centar za sigurniji internet
| « Veljača 2025 » | ||||||
| Po | Ut | Sr | Če | Pe | Su | Ne |
| 27 | 28 | 29 | 30 | 31 | 1 | 2 |
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 1 | 2 |
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
Natjecanje u robotici, Croatian Maker Liga (3. kolo), održano je 6. veljače 2025. u OŠ Eugen Kumičić Rijeka. Naši učenici su sudjelovali u natjecanju i osvojili 3. mjesto u kategoriji starijih skupina (od 6. do 8. razreda), a ekipu su činili učenici 6. razreda iz Čabra: Korina Rendulić, Maksim Kocet i Erin Paripović. Atmosferu s natjecanja prenosimo vam kroz fotografije pod Opširnije.
Čestitamo našim učenicima!



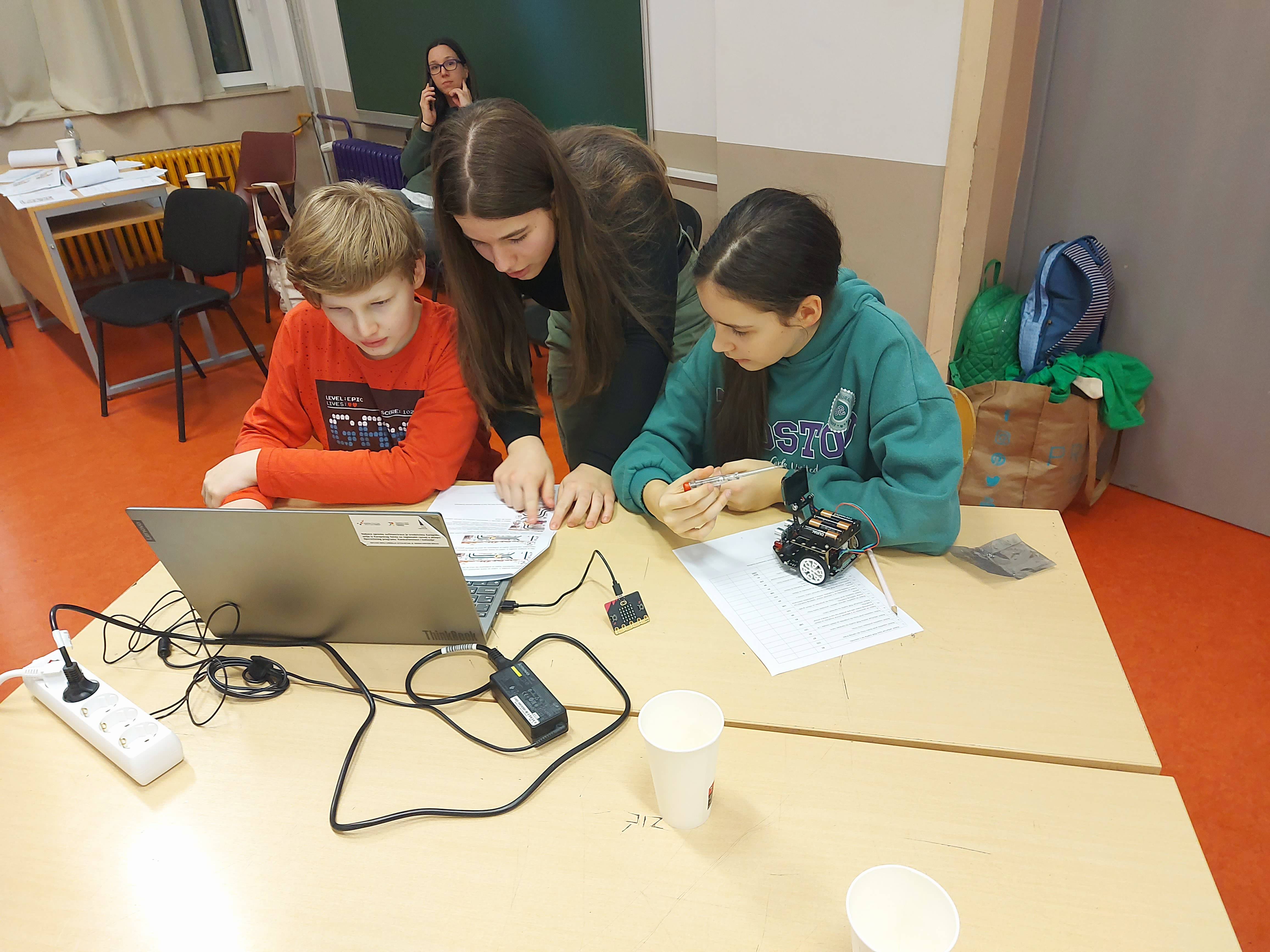
U ovom kolu učenici su trebali programirati robota da prati crnu i bijelu liniju, detektira prepreke ultrazvučnim senzorom, pronalazi liniju, svijetli RGB diodama te su učenici viših razreda osnovne škole programirali i prepoznavanje oznaka HuskyLens kamerom.
HuskyLens kamera bazira se na AI tehnologiji. Kameru su prije rješavanja zadatka naučili da prepoznaje 2 različite oznake te programirali robot da se ponaša ovisno o oznaci koja je nasumičnim odabirom postavljena na stazu.










.gif)

{kind=link}